This week’s assignment for fabrication consists on mounting a motor and creating some kind of creative implementation for it. I decided to work with a standard servo motor and to buy a mount for it.
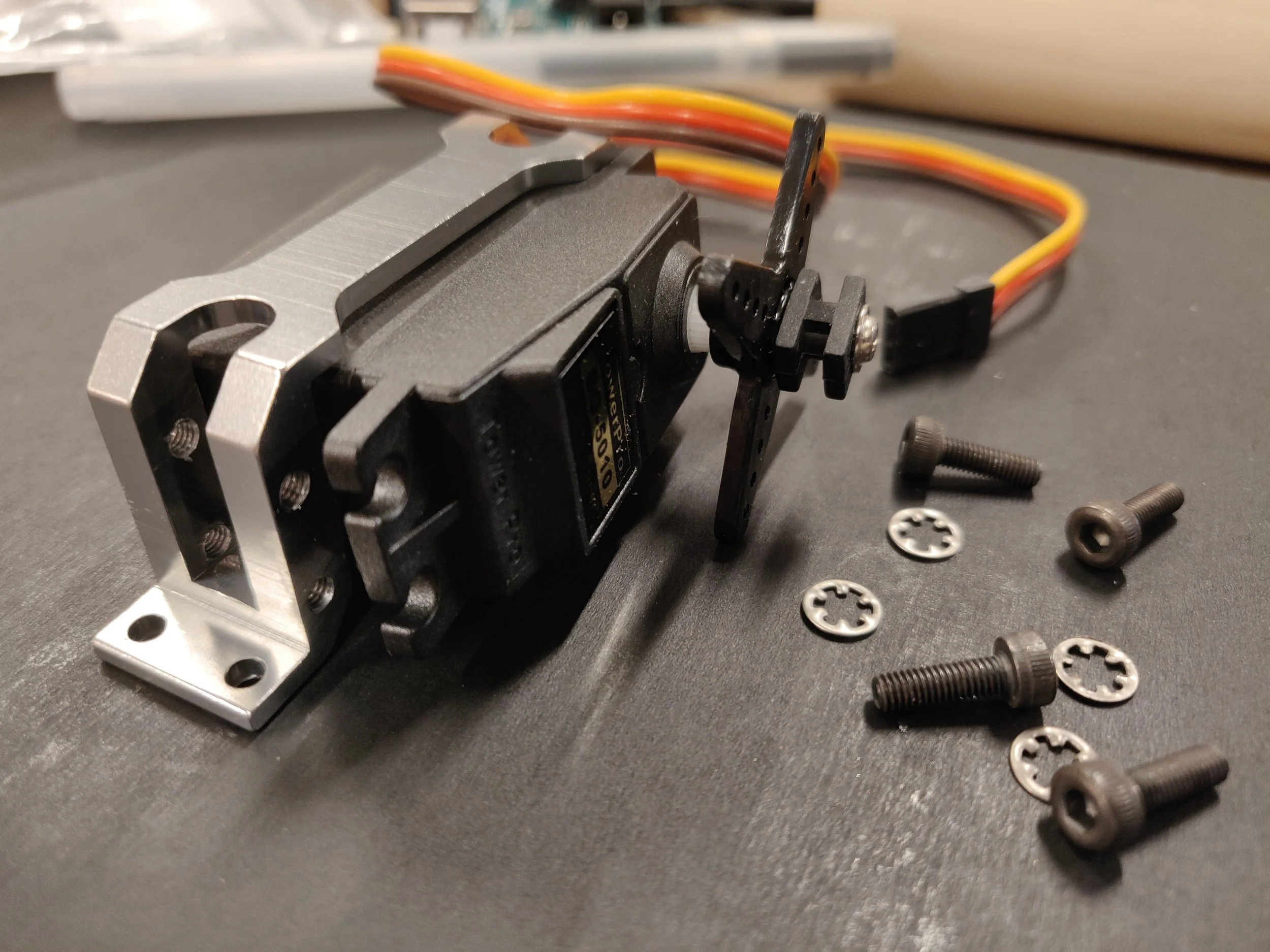
Standard servo and mount
I used an elliptical plastic piece that I found in the junk shelf and I decided to find a way to attach it to the servo geared top end. After trying different cords and wires I decided to try with resistors and joint them from the back of te plastic piece in order to secure it to the movement of the servo which turned out to be an improvised but fairly stable solution.
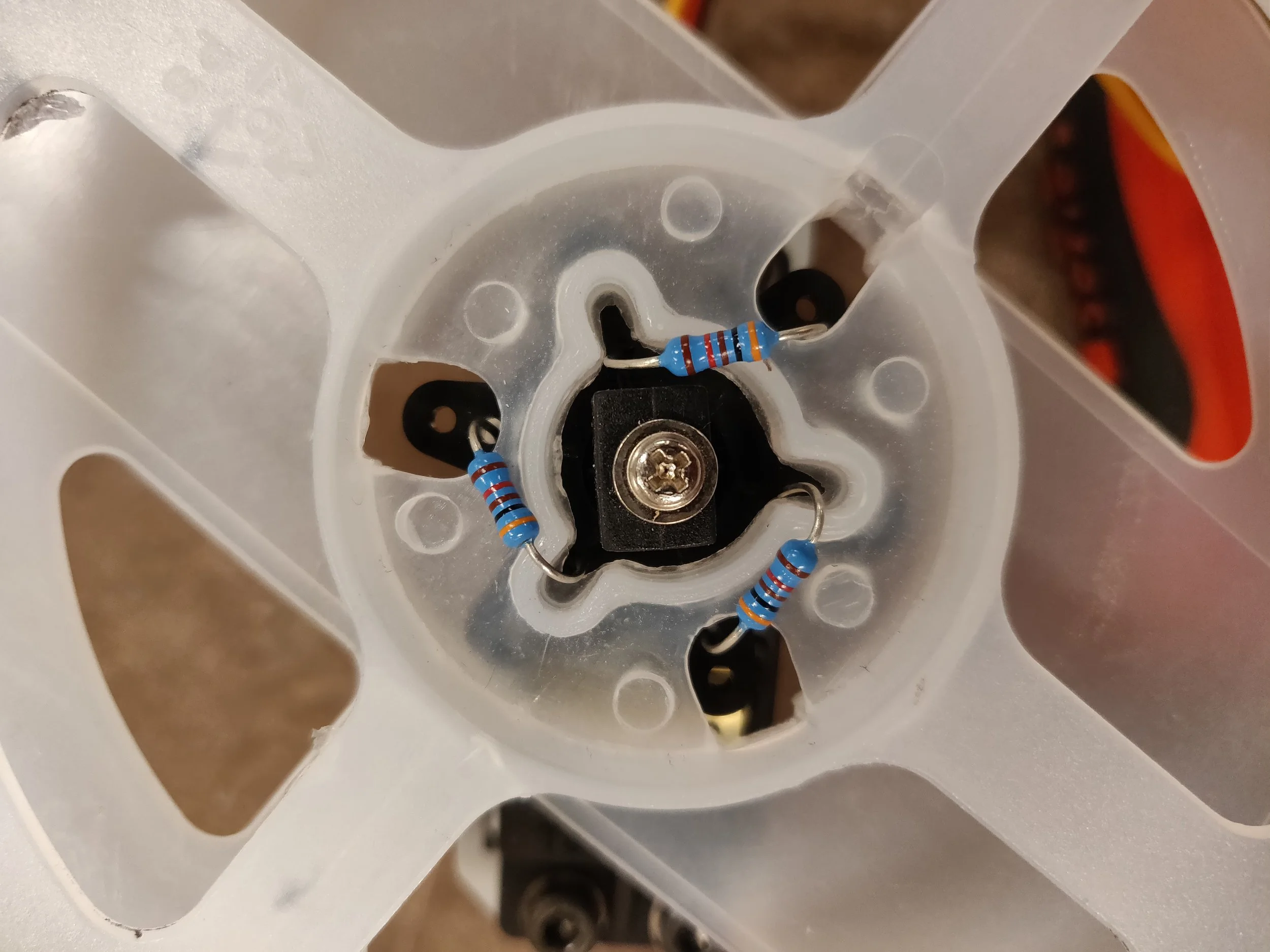
Resistors as joints for the ellipse

Attaching the ellipse to the servo
I mounted the motor with screws in the top of a piece of wood in order to make it stable for when I plugged n the Arduino code. Buying a mount online turned out to be a very good investment and secured the servo to the material enabling me to later decipher the concept that I wanted to follow for the interactivity of the motor.
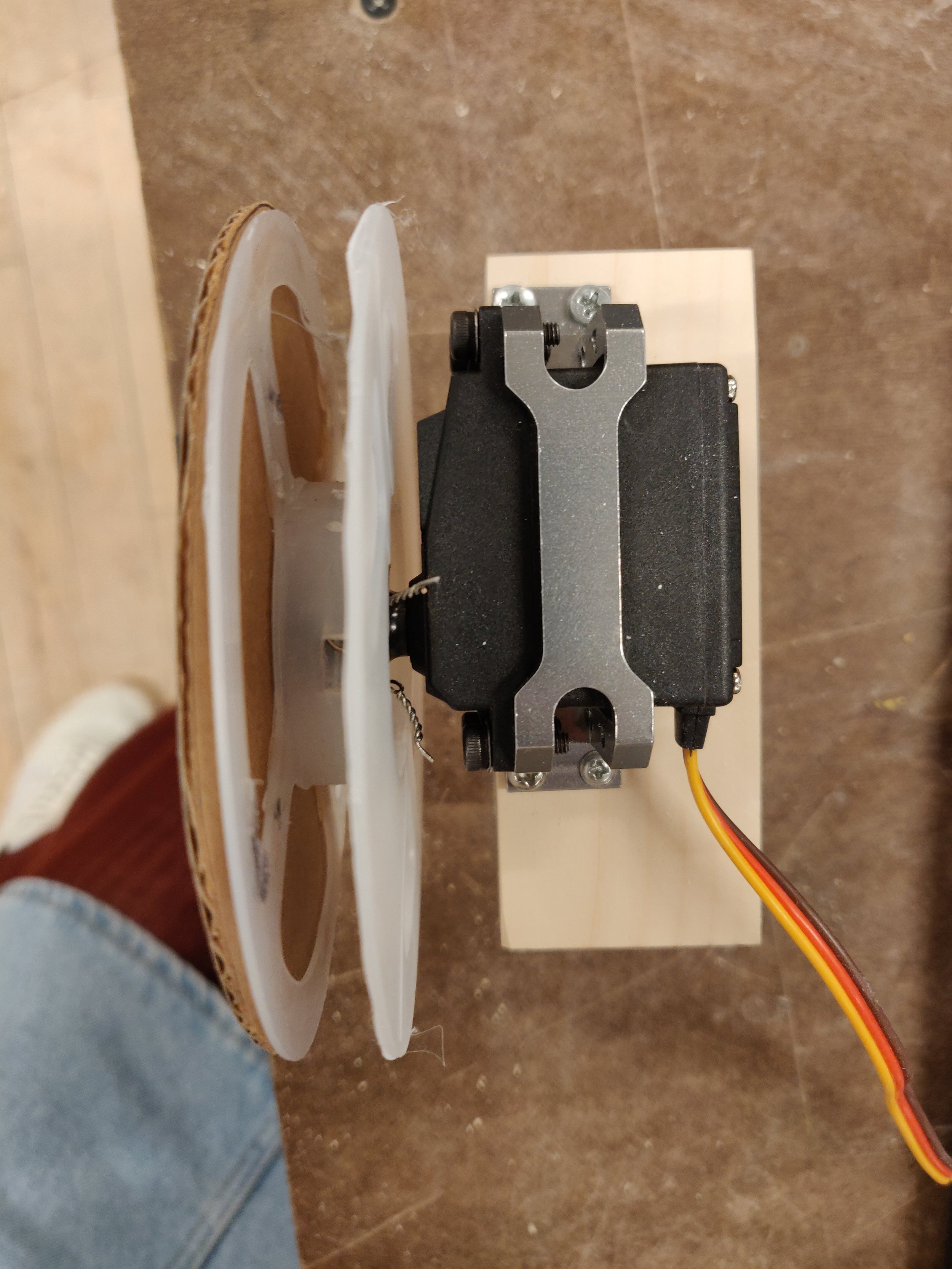
Top view of the mounted servo
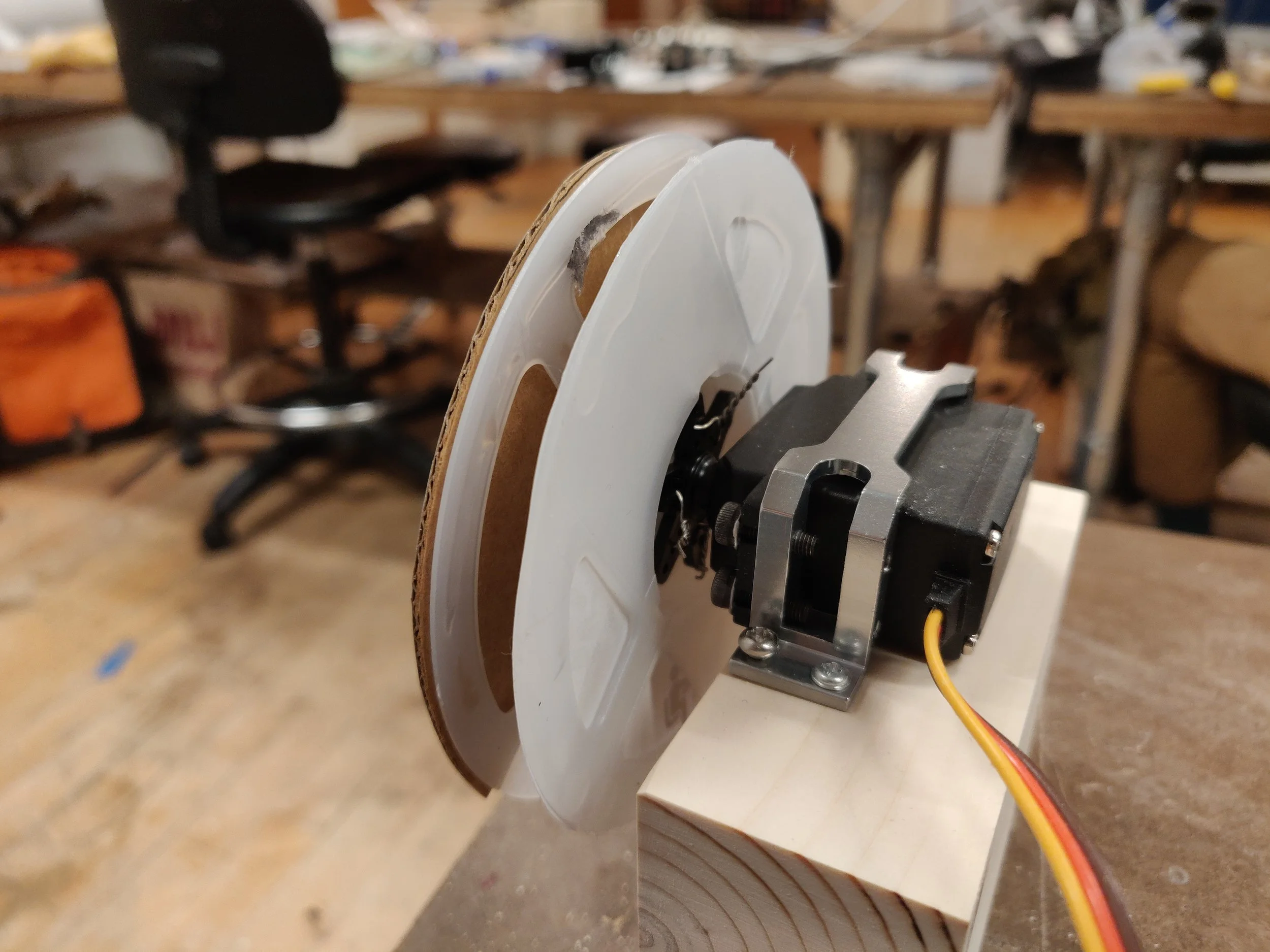
Perspective view of mounted servo
I encounter some problems related to the lack of sleep… judge by yourself!
I finally did a quick fix to the design. The final result is a n ITP post finals roulette that spins slowly 80 degrees from left to right and viceversa. The aperture in the plastic piece that I used gives the possibility to visualize different icons that represent the activities that I (and I am guessing some other ITPers) want to do once we are done with finals.

After finals I want to...
Perspective view